Darstellung der Gravitationskraft und der Schwerebeschleunigung für eine kugelförmige, homogene Erde durch Feldlinien:
Feldlinien verlaufen radial zum Massenzentrum
Dichte der Feldlinien ist proportional zu \(|\mathbf{F}|\) und \(|\mathbf{g}|\)
Äquipotentialflächen: Flächen mit konstantem Schwerepotential stehen senkrecht auf den Fedlinien
Niveauflächen sind Kugelflächen
Das Vektorfeld \(\mathbf{g}\) wird als Gradient eines Skalarpotentials \(W\)\[
\mathbf{g} = -\grad W
\]
dargestellt.
Bedeutung: Arbeit \(A\), die verrichtet wird, um eine Einheitsmasse mit \(\overline{m} =1\) vom feldfreien (unendlich weit entfernten) Punkt entgegen dem Schwerefeld zum Aufpunkt \(P\) zu bewegen.
\[
W = \frac{A}{\overline{m}}, \qquad [W] = \mathrm{N \cdot m \cdot kg^{-1}} = \mathrm{m^2 \cdot s^{-2}}
\]
Raumpunkte mit gleichem Potentialwert liegen auf Äquipotentialflächen (Niveauflächen (\(W_{1},W_{2},W_{3}\)).
Der Schwerevektor \(\mathbf{g}\) steht senkrecht auf den Äquipotentialflächen.
Der Potentialgradient \(\grad W\) zeigt in Richtung des stärksten Potentialanstiegs, \(\mathbf{g}\) zeigt in Richtung des stärksten Potentialgefälles.
Die Schwerebeschleunigung kann auf einer Äquipotentialfläche unterschiedliche Werte besitzen (\(\mathbf{g}_{1} > \mathbf{g}_{2}\)).
2.4 Die Gravitationsbeschleunigung der Erde
Begriffe: Erdschwerebeschleunigung, Schwere
Modellvorstellung: Homogenes Rotationsellipsoid der Gesamtmasse \(m_{E}\) steht unter dem Einfluss der Anziehung durch weitere kosmische Massen (Sonne, Mond).
Die Gravitationsbeschleunigung \(\mathbf{g}\) setzt sich zusammen aus drei Beiträgen:
Beschleunigung erfolgt durch kosmische Massen (Mond, Sonne).
Die Gezeitenwirkung wird durch
die Gangbestimmung am Basispunkt
Vorausberechnung im Gravimeter (\(\theta, \varphi\) bekannt)
erfasst.
Gezeitenkonzept:
Revolution ohne Rotation
auf jedem Punkt in der Rotationsebene um den baryzentrischen Mittelpunkt wirkt konstante Zentrifugalbeschleunigung
entfernungsabhängige Beschleuigung durch kosmische Masse überlagert sich der Zentrifugalbeschleunigung vektoriell
es entstehen zwei Flutberge
2.5 Das Schwerepotential im rotierenden System
Im rotierenden System muss auch die Zentrifugalbeschleunigung berücksichtigt werden.
Wir betrachten einen Punkt \(P\) auf der Oberfläche einer mit der konstanten Winkelgeschwindigkeit \(\pmb\omega_{E}\) um ihre Drehachse rotierenden Kugel.
In einem raumfesten Koordinatensystem mit dem Nullpunkt \(0\) gilt für den Ortsvektor zu \(P\)\[
\mathbf{R}_{P} = \mathbf{R}_{0} + \mathbf{R}_{1}
\] Als Schwerevektor bezeichnet man die Differenz \[
\mathbf{g} = -\grad V(P) - \ddot{\mathbf{R}}_{P}
\] Es gilt \[
\begin{align}
\dot{\mathbf{R}}_{P} & = \dot{\mathbf{R}}_{0} + \dot{\mathbf{R}}_{1} = \dot{\mathbf{R}}_{0} + \pmb\omega_{E}\times {\mathbf{R}}_{1} \\
\ddot{\mathbf{R}}_{P} & = \ddot{\mathbf{R}}_{0} + \pmb\omega_{E}\times\pmb\omega_{E}\times {\mathbf{R}}_{1}
\end{align}
\] wobei \(\dot{\pmb\omega}_{E}\) vernachlässigt wurde. Der Schwerevektor beträgt nun \[
\mathbf{g} = \mathbf{a}_{E} - \ddot{\mathbf{R}}_{0} + (\pmb\omega_{E}\times {\mathbf{R}}_{1}) \times \pmb\omega_{E}
\] Der erste Term ist die reine Gravitationsbeschleunigung der Erde, der letzte die Zentrifugalbeschleunigung infolge der Erdrotation. Der mittlere Term stellt den zeitlich veränderlichen Gezeitenanteil des Schwerefeldes dar.
Für die Zentrifugalbeschleunigung \(\mathbf{a}_{Z}\) gilt mit der Graßmann-Identität \((\mathbf{a} \times \mathbf{b}) \times \mathbf{c} = (\mathbf{a} \cdot \mathbf{c}) \mathbf{b} - (\mathbf{b} \cdot \mathbf{c}) \mathbf{a}\)\[
\mathbf{a}_{Z} = (\pmb\omega_{E}\times {\mathbf{R}}_{1}) \times \pmb\omega_{E} = \omega_{E}^{2} \mathbf{R}_{1}
-( \mathbf{R}_{1} \cdot \pmb\omega_{E})\pmb\omega_{E} = \omega_{E}^{2}\mathbf{R}_{\perp}
\]\(\mathbf{R}_{\perp}\) ist die zur Rotationsachse rechtwinklige Komponente des Vektors \(\mathbf{R}_{1}\). Wegen \[
\mathbf{R}_{\perp} = \frac{1}{2} \grad R_{\perp}^{2}
\] ist auch \(\mathbf{a}_{Z}\) ein Gradientfeld mit \[
\begin{align}
\mathbf{a}_{Z} & = \grad Z \\
Z & = \frac{1}{2} \omega_{E}^{2}R_{\perp}^{2} = \frac{1}{2}\omega_{E}^{2}\left( x^{2} + y^{2} \right)
\end{align}
\] Zusammengefasst ist \[
W = V + Z
\] das Schwerepotential für einen auf der Erde mitrotierenden Punkt, und es gilt \[
\mathbf{g} = -\grad W
\] Das Schwerepotential erfüllt die Differentialgleichung \[
-\Delta W = 4 \pi f \rho - 2\omega_{E}^{2}.
\] Die Flächen \(W = \mathrm{const}\) nennt man Äquipotentialflächen. Sie sind geschlossen und berühren sich nicht. Eine Taylorreihenentwicklung des Potentials \(W\) in der Umgebung des Punktes \(P(\mathbf{R})\) bis zum ersten Glied ergibt \[
W(\mathbf{R} + \mathrm{d}\mathbf{R}) = W(\mathbf{R}) + \grad W \cdot \mathrm{d}\mathbf{R}
\] Der Potentialunterschied \(\mathrm{d}W = \grad W \cdot \mathrm{d}\mathbf{R}\) zweier Punkte im Abstand \(\mathrm{d}\mathbf{R}\) verschwindet, wenn \(\grad W\) und \(\mathrm{d}\mathbf{R}\) einen rechten Winkel bilden. Er ist am größten, wenn sie parallel sind. Der Schwerevektor \(\mathbf{g} = -\grad W\) steht also senkrecht auf den Flächen \(W = \mathrm{const}\). man spricht von Niveauflächen.
2.6 Newtonsches Volumenpotential
Betrachten Erde als Punktmasse \(m_{E}\) im Koordinatenursprung. Potential in Punkt \(\mathbf{r}\) beträgt für \(|\mathbf{r}| > 0\)\[
V(\mathbf{r}) = -f \frac{m_{E}}{|\mathbf{r}|}
\] Für ausgedehnte kontinuierliche Massenverteilung: Volumenelement \(\mathrm{d}\tau\) in Punkt \(\mathbf{r}'\) besitzt Masse \(\mathrm{d}m(\mathbf{r}') = \rho(\mathbf{r}')\,\mathrm{d}\tau\) . Integration liefert \[
V(\mathbf{r}) = -f \int \frac{\rho(\mathbf{r}')}{| \mathbf{r} - \mathbf{r}'|} \, \dd \tau
\] ### Beispiel Kugel Betrachten Kugel im Koordinatenursprung von Radius \(a\) mit homogener Dichtebelegung. \[
V(\mathbf{r}) = -f \rho \int \frac{\dd \tau}{|\mathbf{r} - \mathbf{r}' |}
\] In Kugelkoordinaten ist \(\mathrm{d}\tau = r^{2}\,\mathrm{d}r \sin \theta \,\mathrm{d}\theta \,\mathrm{d}\varphi\). Liefert für homogene Kugel im Außenraum \[
V(R) = -f \frac{m}{R}
\] wobei \(R\) der Abstand zum Kugelmittelpunkt sowie \[
m = 4 \pi \rho \int \limits_{0}^{a} r^{2} \, \dd r = 4 \pi\rho \frac{a^{3}}{3}
\] die Masse der Kugel ist. Mehr Details liefert die Potentialtheorie. Dort behandeln wir das Newtonsche Kugelschalentheorem, woraus woraus wir das Potential innerhalb und außerhalb einer Kugelschale berechnen werden. Dichtemodelle der Form \(\rho = \rho(r)\) liefert bei Beachtung des Trägheitsmoments der Erde Einblicke in den Verlauf der Schwere im Erdkörper.
Außerhalb der Erde gilt \(|V| \sim \frac{1}{r}\) und \(|\mathbf{g}| \sim \frac{1}{r^{2}}\).
2.7 Ableitungen des Potentials
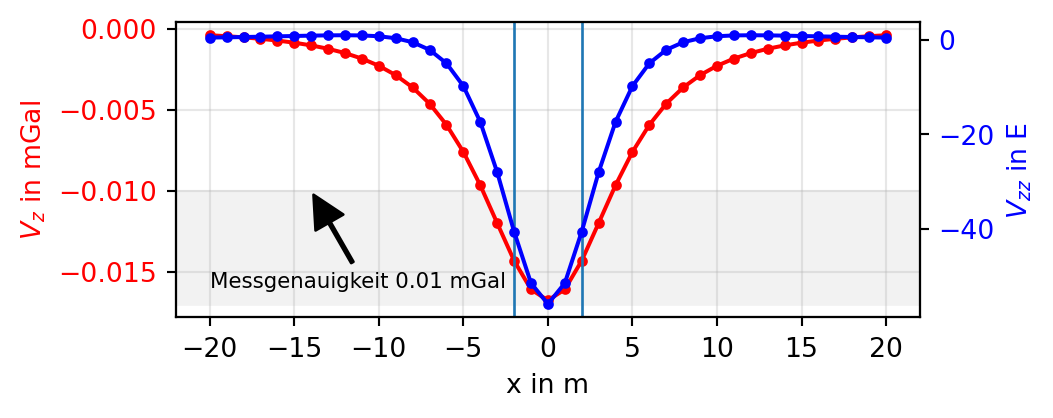
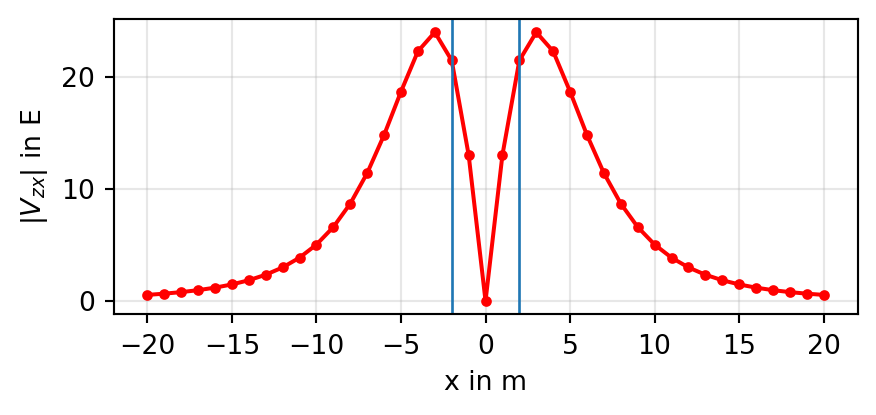
In der Geophysik ist \(\mathbf{g}\) die interessante Größe. Wir benötigen also den Gradienten von \(V\), d.h. die partiellen Ableitungen von \(V\) in Richtung der Koordinatenachsen.
Wir betrachten wieder eine Kugel als einfachsten Störkörper.
Im Punkt \(P(x,y,z)\) lautet das Potential \[
V(P) = -\frac{f m}{\sqrt{ x^{2} + y^{2} + (z - t)^{2}}}
\]
Größe
Definition
\(V_{z}\)
\(-\grad V \cdot \mathbf{e}_{z} = \mathbf{g}\cdot \mathbf{e}_{z}\)